维基百科,自由的百科全书
微分几何中,曲面上一点的高斯曲率是该点主曲率κ1和κ2的乘积。它是曲率的内在度量,也即,它的值只依赖于曲面上的距离如何测量,而不是曲面如何嵌入到空间。这个结果是高斯绝妙定理的主要内容。
用符号表示,高斯曲率K定义为
 是协变导数而g是度量张量。
是协变导数而g是度量张量。
R3中的正规曲面的一点p,则高斯曲率为
关于高斯曲率的一个很有用的公式是用等温坐标中的拉普拉斯算子表达的刘维尔方程。
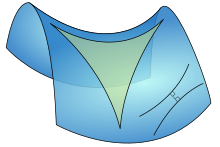
 负曲率曲面上的三角形三角之和小于平面三角形的三角之和。
曲面上某个区域的高斯曲率的曲面积分称为总曲率。测地三角形的总曲率等于它的三角之和与
负曲率曲面上的三角形三角之和小于平面三角形的三角之和。
曲面上某个区域的高斯曲率的曲面积分称为总曲率。测地三角形的总曲率等于它的三角之和与 的差别。正曲率曲面上的三角形三角之和大于,而负曲率曲面上的三角形三角之和小于。零曲率曲面上,三角之和正好为,譬如欧几里得平面。
的差别。正曲率曲面上的三角形三角之和大于,而负曲率曲面上的三角形三角之和小于。零曲率曲面上,三角之和正好为,譬如欧几里得平面。
在现代微分几何中,"曲面"抽象的看来是一个二维微分流形。将这个观点和曲面的经典理论联系起来的是将抽象曲面嵌入到R3中,并用第一基本形式赋予黎曼度量。假设这个嵌入在R3中的像是曲面S。局域等度就是R3中的开区域之间的微分同胚f: U → V,限制到S ∩ U就是到自己的像的等度变换。绝妙定理可以如下表述:

用符号表示,高斯曲率K定义为
 .
.
 是协变导数而g是度量张量。
是协变导数而g是度量张量。R3中的正规曲面的一点p,则高斯曲率为

关于高斯曲率的一个很有用的公式是用等温坐标中的拉普拉斯算子表达的刘维尔方程。
目录[隐藏] |
[编辑] 非形式化定义
利用隐函数定理将曲面用二元函数f的图像来表示,并且假设点p为临界点,也即f在该点的梯度为0(这总是可以通过适当的刚体运动来实现)。然后p点的高斯曲率就是f在点p的黑塞矩阵(二阶导数组成的2x2矩阵)的行列式。这个定义只要用基本的微积分知识就可以理解杯底或者帽顶“对应”鞍点的区别。[编辑] 总曲率
 的差别。正曲率曲面上的三角形三角之和大于,而负曲率曲面上的三角形三角之和小于。零曲率曲面上,三角之和正好为,譬如欧几里得平面。
的差别。正曲率曲面上的三角形三角之和大于,而负曲率曲面上的三角形三角之和小于。零曲率曲面上,三角之和正好为,譬如欧几里得平面。
[编辑] 重要定理
[编辑] 绝妙定理
在现代微分几何中,"曲面"抽象的看来是一个二维微分流形。将这个观点和曲面的经典理论联系起来的是将抽象曲面嵌入到R3中,并用第一基本形式赋予黎曼度量。假设这个嵌入在R3中的像是曲面S。局域等度就是R3中的开区域之间的微分同胚f: U → V,限制到S ∩ U就是到自己的像的等度变换。绝妙定理可以如下表述:
- 嵌入到R3的光滑曲面的高斯曲率在局域等度下不变。
[编辑] 高斯-博内定理
[编辑] 常曲率曲面
- Minding定理(1839年)断言所有具有相同常曲率K的曲面局域等度。Minding的一个结果是所有曲率为0的曲面可以通过弯曲平面区域来构造。这样的曲面称为可展曲面。Minding也提出了有常正曲率的闭曲面是否刚性的问题。
[编辑] 其它公式

- Brioschi公式只用第一基本形式给出高斯曲率:

- 对于正交参数化,高斯曲率为:

- 高斯曲率是测地圆的周长和平面上的圆的周长之差的极限:
![K = \lim_{r \rarr 0} [2 \pi r - \mbox{C}(r)] \cdot \frac{3}{\pi r^3}](http://upload.wikimedia.org/math/5/b/4/5b4e53c1e7abb9c79df94314c76ad346.png)
- 高斯曲率是测地圆的面积和平面上的圆的面积之差的极限:
![K = \lim_{r \rarr 0} [\pi r^2 - \mbox{A}(r)] \cdot \frac{12}{\pi r^4}](http://upload.wikimedia.org/math/5/9/a/59adf83fda79162a16677287fd678b76.png)

No comments:
Post a Comment