维基百科,自由的百科全书
(重定向自剛體)
 表示;而其大小則用
表示;而其大小則用  來表示。
來表示。
在经典力学裡,刚体通常被視為连续质量分佈体;在量子力学裏,刚体被視為一群粒子的聚集。例如,分子(由假定為質點的电子与核子组成)时常會被视为刚体(請参阅條目分子的分类为刚性转子)。
目录[隐藏] |
[编辑] 运动学
[编辑] 位置與取向
剛體是由一群數量超多的質點組成。實際而言,不可能精確地追蹤其中每一個質點的運動。為了簡化運算,可以利用剛體的「剛性」,即其內部所有質點彼此之間距離不變的性質。假若物體具有剛性,則倚靠設定三個不同線質點的位置,就足以設定此物體的位置。這意味著,在三維空間裏,剛體至多只有九個自由度,但由於假定三個質點之間的距離固定不變,所以,剛體只有六個自由度。假設還有其它約束,例如,剛體的運動必需繞著其內部一點旋轉(定點轉動),或繞著其內部一直軸旋轉(定軸轉動),則自由度會小於六。關於其它任意質點P的位置,只要知道質點P對於上述三個質點之中的任意一個質點的相對位置,就可以重建這質點的位置。通常,整個剛體的空間位形可以簡易地以參數設定:
- 剛體的「位置」:挑選剛體內部一點G來代表整個剛體,通常會設定物體的質心或形心為這一點。從空間參考系S觀測,點G的位置就是整個剛體在空間的位置。位置可以應用向量的概念來表示:向量的起點為參考系S的原點,終點為點G。設定剛體的位置需要三個坐標,例如,採用直角坐標系,這三個坐標為x-坐標、y-坐標、z-坐標。這用掉了三個自由度。
- 剛體的取向:描述剛體取向的方法有好幾種,包括方向餘弦、歐拉角、四元數等等。這些方法設定一個附體參考系B的取向(相對於空間參考系S)。附體參考系是固定於剛體的參考系。相對於剛體,附體參考系的取向固定不變。由於剛體可能會呈加速度運動,所以附體參考系可能不是慣性參考系。空間參考系是某設定慣性參考系,例如,在觀測飛機的飛行運動時,附著於飛機場控制塔的參考系可以設定為空間參考系,而附著於飛機的參考系則可設定為附體參考系。剛體的取向需要用到另外三個自由度。
[编辑] 方向餘弦

 與參考系的三個單位向量
與參考系的三個單位向量  、
、 、
、 之間的夾角分別為
之間的夾角分別為  、
、 、
、 。 、 、 ,沿著參考系B的坐標軸的三個單位向量分別為
。 、 、 ,沿著參考系B的坐標軸的三個單位向量分別為  、
、 、
、 。定義
。定義  與
與 之間的方向餘弦
之間的方向餘弦  為
為 ;
;
 是 與 之間的夾角。 、 、 與 、 、 之間的關係分別為
是 與 之間的夾角。 、 、 與 、 、 之間的關係分別為 、
、 、
、 。
。
 :
: 。
。
 ,給定方向餘弦矩陣 ,則可設定附體參考系B的取向,也就是剛體的取向。
,給定方向餘弦矩陣 ,則可設定附體參考系B的取向,也就是剛體的取向。反過來,經過一番運算,可以得到
 。
。給定位置向量

 ,
,
與 的內積為 。
。
可以將從空間參考系S觀測的位置坐標  ,變換為從附體參考系B觀測的位置坐標
,變換為從附體參考系B觀測的位置坐標  ,因此又稱為「變換矩陣」。
,因此又稱為「變換矩陣」。變換矩陣
也可以做反變換如下: 。
。
是一種正交矩陣,滿足「正交條件」 ;
;
 是克羅內克函數。
是克羅內克函數。注意到
與  不同,夾角 是
不同,夾角 是 與空間參考系S的坐標軸單位向量
與空間參考系S的坐標軸單位向量  之間的夾角。變換矩陣 通常不是對稱矩陣。
之間的夾角。變換矩陣 通常不是對稱矩陣。
 角弧成為點P'。右圖顯示「被動變換」:參考軸被旋轉
角弧成為點P'。右圖顯示「被動變換」:參考軸被旋轉  角弧,而點P固定不動。 可以視為旋轉矩陣。例如,將附體參考系B或剛體旋轉,從 、 、 旋轉 角弧成為
角弧,而點P固定不動。 可以視為旋轉矩陣。例如,將附體參考系B或剛體旋轉,從 、 、 旋轉 角弧成為  、
、 、
、 ;其中,
;其中, 。對於這旋轉,旋轉矩陣 為
。對於這旋轉,旋轉矩陣 為 。
。
 與 之間的關係為
與 之間的關係為 。
。
也可以視為將點P的位置向量  旋轉 角弧成為點P'的位置向量
旋轉 角弧成為點P'的位置向量  :
: 。
。
[编辑] 歐拉角

 ) ,可以從xyz-軸變換到XYZ-軸。交點線(N)是以綠色表示 。 足以設定附體參考系B的取向。但是,矩陣 有九個元素,而剛體只能供給三個自由度來設定取向,因為這九個元素不是自變量。歐拉角的三個自變量可以用來設定剛體的取向。
) ,可以從xyz-軸變換到XYZ-軸。交點線(N)是以綠色表示 。 足以設定附體參考系B的取向。但是,矩陣 有九個元素,而剛體只能供給三個自由度來設定取向,因為這九個元素不是自變量。歐拉角的三個自變量可以用來設定剛體的取向。相對於空間參考系S,附體參考系B的取向,可以用三個歐拉角來設定。參閱右圖。設定 xyz-軸為空間參考系S的坐標軸,XYZ-軸為附體參考系B的坐標軸。稱 xy-平面與 XY-平面的相交為「交點線」,用英文字母(N)代表。按照「zxz 順規」,歐拉角可以這樣定義:
 是 x-軸與交點線(N)之間的夾角,
是 x-軸與交點線(N)之間的夾角, 是 z-軸與Z-軸之間的夾角,
是 z-軸與Z-軸之間的夾角, 是交點線(N)與X-軸之間的夾角。
是交點線(N)與X-軸之間的夾角。
 、
、 、
、 。
。
是由三個簡單旋轉矩陣  、
、 、
、 共同合成:
共同合成: 。
。
- 最裏面的(最右的)矩陣代表繞著 z 軸的旋轉。
- 最外面的(最左的)矩陣代表繞著 Z 軸的旋轉。
- 在中間的矩陣代表繞著交點線的旋轉。
矩陣:[2] 。
。
的逆矩陣是: 。
。
[编辑] 歐拉旋轉定律
歐拉旋轉定理表明,在三維空間裏,假設約束剛體內部一點固定不動,則其任意位移等價於繞著某固定軸的一個旋轉,而這固定軸必包含這固定點。換句話說,設定附體參考系B的原點為這固定點,則附體參考系B不會因為這位移而涉及任何平移運動,再設定附體參考系B的z-軸與固定軸同軸,則這位移對應於繞著附體參考系B的z-軸旋轉 角弧,而z-軸的方向是由 與 角弧給出。[3]對於內部有一點被約束固定不動的剛體(或原點固定不動的參考系),歐拉旋轉定理將其任意位移等價為繞著某固定軸的一個旋轉。這允許使用旋轉來表達取向的改變。因此,變換矩陣
可以視為三維旋轉的旋轉矩陣,將附體參考系B或剛體做任意環繞著固定點的旋轉,從 、 、 旋轉成為 、 、 。參考軸 與 之間的關係為- 。
[编辑] 沙勒定理

如右圖所示,從時間
 到時間
到時間  ,當剛體在做平移運動時,任意內部兩點,點P與點Q的軌跡(以黑色實線表示)相互平行,線段
,當剛體在做平移運動時,任意內部兩點,點P與點Q的軌跡(以黑色實線表示)相互平行,線段  (以黑色虛線表示)的方向保持恆定。
(以黑色虛線表示)的方向保持恆定。挑選剛體內部一點G來代表整個剛體,設定附體參考系B的原點於點G(稱為「基點」),則從空間參考系S觀測,在剛體內部任意一點P的位置
 為
為 ;
;
 、
、 分別是基點G的位置、點P對於基點G的相對位置。
分別是基點G的位置、點P對於基點G的相對位置。從附體參考系B觀測,剛體內部每一點的位置都固定不變,但從空間參考系S觀測,剛體從時間
到時間 的運動,可以分為基點G從  到
到  的平移運動,與位移 從時間 到時間 的旋轉運動。
的平移運動,與位移 從時間 到時間 的旋轉運動。[编辑] 平移速度與角速度
從不同的參考系觀測剛體運動,可能會獲得不同的平移速度和不同的角速度。為了確保測量結果具有實際物理意義,必需先給定參考系。剛體的平移速度是向量,是其位置向量的時間變化率,是附著於剛體的基點G的速度。對於純平移運動(沒有任何旋轉運動),剛體內部所有點的移動速度相同。假設涉及旋轉運動,則通常剛體內部任意兩點的瞬時速度不相等;只有當它們恰巧處於同一直軸,而這直軸平行於轉動瞬軸,則它們的瞬時速度相等。
角速度也是向量,描述剛體取向改變的角速率,和剛體旋轉時的瞬時轉軸的方向(歐拉旋轉定理保證瞬時轉軸的存在)。在任意時間,剛體內部每一個質點的角速度相同。
[编辑] 向量的時間變化率
假設一剛體呈純旋轉運動,其附體參考系B也會跟著旋轉,因此,對於任意向量 ,從這附體參考系B與從空間參考系S觀測,會得到不同的結果。假設附體參考系B
,從這附體參考系B與從空間參考系S觀測,會得到不同的結果。假設附體參考系B  與空間參考系S
與空間參考系S  同原點。對於這些參考系,三維含時向量
同原點。對於這些參考系,三維含時向量  分解為
分解為 。
。
對於時間的導數為 。
。
 ;
;
 是方向餘弦對於時間的導數。
是方向餘弦對於時間的導數。由於
 垂直於 , 只能是其他兩個單位向量的線性組合:
垂直於 , 只能是其他兩個單位向量的線性組合: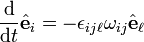 ;
;
 是列維-奇維塔符號,
是列維-奇維塔符號, 是係數。
是係數。對於任意
 , 單位向量 與
, 單位向量 與  的內積對於時間的導數為
的內積對於時間的導數為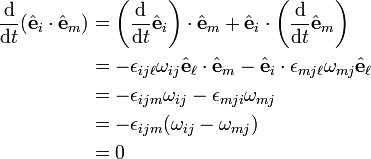 的下標
的下標  多餘無用,可以刪除,變為
多餘無用,可以刪除,變為  :
: 。
。
 方程式最右邊項目
方程式最右邊項目  ,對換傀標
,對換傀標  ,可以得到
,可以得到 。
。
 是由三個係數
是由三個係數  、
、 、
、 組成,對應於附體參考系的三個參考軸 、 、 ,係數數值可以從歐拉角計算求得:
組成,對應於附體參考系的三個參考軸 、 、 ,係數數值可以從歐拉角計算求得: 、
、 、
、 。
。
、 、 的三個旋轉軸分別為  、
、 、
、 ,三個角速度分別為
,三個角速度分別為 、
、 、
、 。
。
 、
、 、
、 。
。
、 、 就是歐拉角的  、
、 、 ,所以,向量 是附體參考系B旋轉的角速度。
、 ,所以,向量 是附體參考系B旋轉的角速度。總結,向量
對於時間的導數為 。
。
 、
、 分別為從空間參考系S、附體參考系B觀測到的向量 對於時間的導數,上述方程式可以表達為
分別為從空間參考系S、附體參考系B觀測到的向量 對於時間的導數,上述方程式可以表達為 。
。
 可以想像為,從空間參考系S觀測,剛體內部位置向量為 的質點,由於剛體旋轉而產生的速度。
可以想像為,從空間參考系S觀測,剛體內部位置向量為 的質點,由於剛體旋轉而產生的速度。向量
是任意向量,因此可以將  、
、 當作算符,這樣,對應的算符方程式的形式為:
當作算符,這樣,對應的算符方程式的形式為: 。
。
[编辑] 運動學方程式
根據沙勒定理,剛體的最廣義位移等價於一個平移加上一個旋轉。[3]挑選剛體內部一點G來代表整個剛體,設定附體參考系B的原點於基點G,則從空間參考系S觀測,在剛體內部任意一點P的位置 為- ;
、 分別是基點G的位置、點P對於基點G的相對位置。點P的速度
 為
為 ;
;
 、
、 分別是基點G的速度、點P對於基點G的相對速度。
分別是基點G的速度、點P對於基點G的相對速度。應用前段推導出的適用於任意含時向量的算符方程式,可以計算出
 。由於從附體參考系B觀測,剛體內部每一點的位置都固定不變,項目
。由於從附體參考系B觀測,剛體內部每一點的位置都固定不變,項目  等於零:
等於零: ;
;
是剛體的角速度向量。所以,點P的速度為
 。
。
 為
為 ;
;
 、
、 分別是基點G的速度、點P對於基點G的相對速度。
分別是基點G的速度、點P對於基點G的相對速度。再應用前段推導出的算符方程式,可以計算出
 ;
;
 是附體參考系B旋轉的角加速度向量。
是附體參考系B旋轉的角加速度向量。[编辑] 動理學
- 主项目:刚体动力学
当质心被选为参考点时:
- 刚体的动量与其旋转运动无关。在任何时间,动量等于刚体的总质量乘以平移速度。
- 不论刚体的平移运动为何,对于质心的角动量皆等同。所以,在计算角动量时,可以忽略平移运动。在任何时间,角动量等于惯性张量乘以角速度。假若知道刚体绕主轴的角速度,那麼,角动量对于每一主轴的分量,是对应的主慣性矩乘以对应的角速度;力矩是转动惯量乘以角加速度。
- 在无外力作用下,可能形成的运动为等速直线运动、稳定绕定轴转动、零力矩进动等等。
- 作用于刚体的净外力,等于总质量乘以刚体平移运动的加速度(也就是说,不论净外力矩是否为零,或这刚体是否在作旋转运动,牛頓第二運動定律可以正确地应用于刚体平移运动,)。
- 总动能是平移动能与旋转动能的总和。
 ,其中
,其中 为刚体所受合外力的力矩,
为刚体所受合外力的力矩, 为刚体转动惯量,
为刚体转动惯量, ,其中
,其中 表示合外力的力矩
表示合外力的力矩 上所作的功,
上所作的功, 为刚体角速度。
为刚体角速度。 ,其中
,其中 为刚体质心对参考系的速度。
为刚体质心对参考系的速度。
No comments:
Post a Comment